Published: May 13, 2024 by Ingrid Navarro
SafeShift: Safety-informed Distribution Shift for Robust Trajectory Prediction in Autonomous Driving
Benjamin Stoler *, Ingrid Navarro *, Meghdeep Jana, Soonmin Hwang, Jonathan Francis and Jean Oh
*Denotes equal contribution
Abstract
As autonomous driving technology matures, the safety and robustness of its key components, including trajectory prediction is vital. Although real-world datasets such as Waymo Open Motion provide recorded real scenarios, the majority of the scenes appear benign, often lacking diverse safety-critical situations that are essential for developing robust models against nuanced risks. However, generating safety-critical data using simulation faces severe simulation to real gap. Using real-world environments is even less desirable due to safety risks. In this context, we propose an approach to utilize existing real-world datasets by identifying safety relevant scenarios naively overlooked, e.g., near misses and proactive maneuvers. Our approach expands the spectrum of safety-relevance, allowing us to study trajectory prediction models under a safety-informed, distribution shift setting. We contribute a versatile scenario characterization method, a novel scoring scheme for reevaluating a scene using counterfactual scenarios to find hidden risky scenarios, and an evaluation of trajectory prediction models in this setting. We further contribute a remediation strategy, achieving a 10% average reduction in predicted trajectories’ collision rates.
Method
Overview
Scenarios sampled from real-world datasets are often deemed benign, generally lacking diverse safety-critical situations essential for developing robust models for trajectory prediction.
Thus, existing approaches for validating autonomous driving (AD) agents have resorted to:
- On-road tests, where valuable rare events are potentially dangerous to other drivers and vulnerable road users.
- Simulated experiments, where artificial, inaccurate behaviors can leave models unprepared for real-world deployment.
- Data-driven scenario generation, where generating realistic and challenging scenarios remains an open problem.
Motivating Example
An effective and under-explored alternative lies somewhere in the middle: mining large-scale real-world datasets to find and leverage meaningful safety-relevant scenarios that may be hidden in the data.
Our key insight is that safety-relevance includes not just scenarios where observed agents act in a safety-critical manner, but also scenarios where agents are able to avoid infractions through proactive maneuvers.
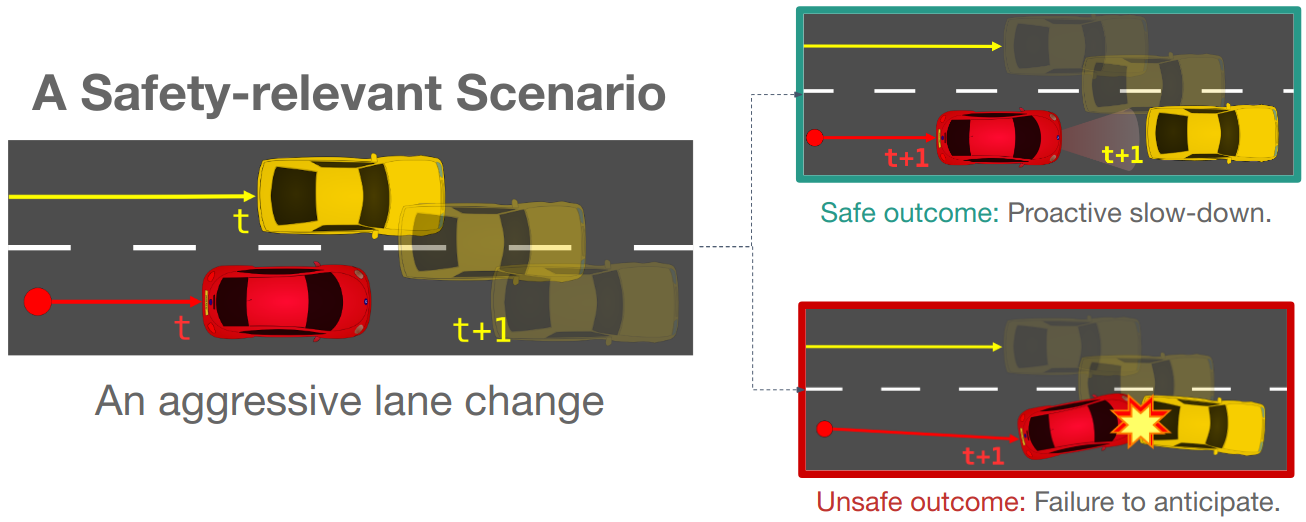
A motivating example is shown in the figure below, where the yellow vehicle makes an aggressive lane change in front of another vehicle. Here, we showcase two possible outcomes:
- A safe outcome, where the red vehicle proactively slows down to avoid a collision with the yellow vehicle, and;
- An unsafe outcome, where the red vehicle was distracted, and thus, fails to anticipate the yellow vehicle’s lane change.
Our idea
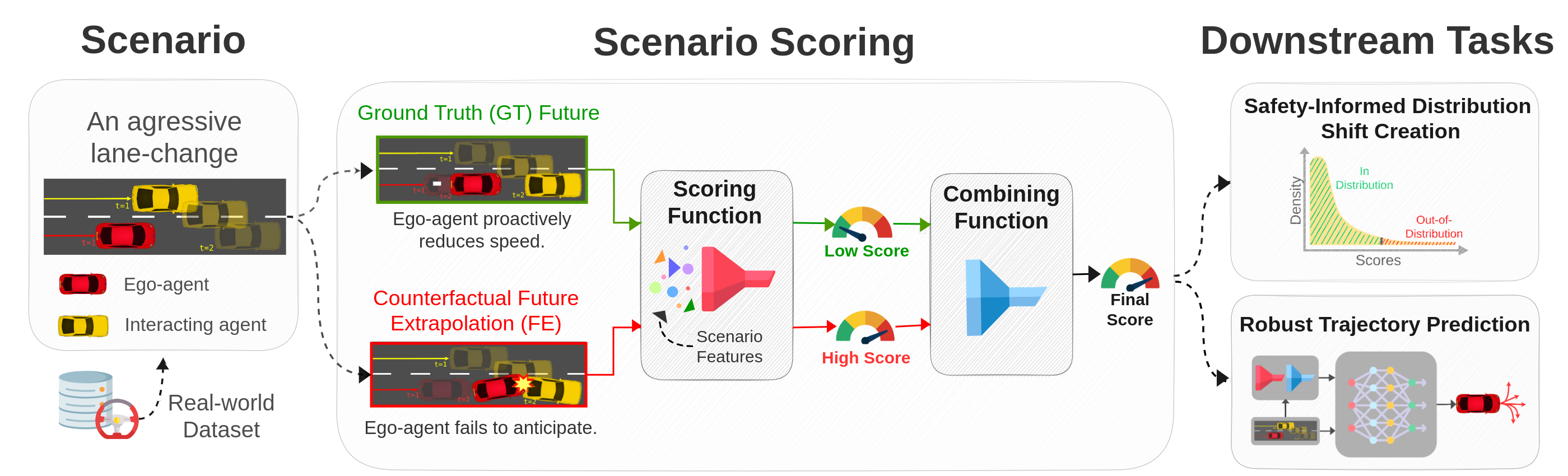
We propose SafeShift, an framework consisting of:
- A scenario characterization approach focused on capturing safety-relevant scenarios naively overlooked in real-world datasets, e.g., near collisions and proactive maneuvers.
- A methodology for scoring safety-criticality which utilizes the scenario features in 1 via counterfactual probing to characterize what-if situations.
- Two downstream applications: crafting a safety-informed distribution shift and improving the robustness of trajectory prediction models.
Method
Scenario Characterization
We propose a scenario characterization scheme, where low-level features are computed within a scenario and then aggregated to form a score to represent a scenario’s overall safety-relevance. We consider features across two categories:
- Individual features which characterize single-agent state and behavior, including:
- Features derived from positional data: speed, acceleation and jerk;
- Context-dependent features: waiting period at a conflict point (e.g., waiting at intersections and stop signs), agent speed difference with lane’s limit speed, and adherence to a lane, and;
- Behavior features: trajectory anomalies.
- Social features which characterize agent-to-agent interactions:
- Time-to-conflict features: time headway (THW), time-to-collision (TTC), deceleration rate to avoid a crash (DRAC) and minimum time to conflict point (mTTCP);
- Collision features: collision rate, segement-to-segment overlap, and;
- Behavior features: trajectory-pair anomalies.
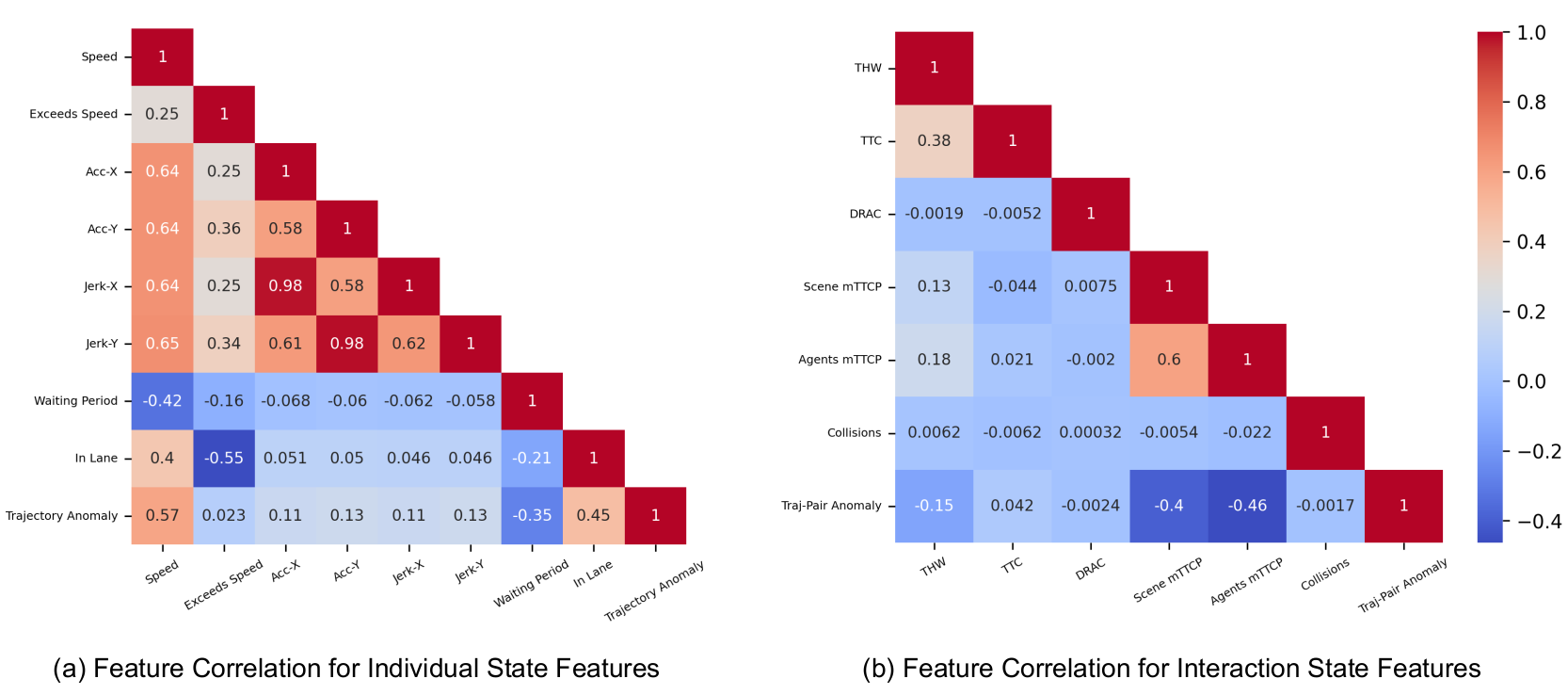
We perform a feature correlation analysis, showing that our selected features are largely complementary, without excessive overlap in coverage.
Scenario Scoring
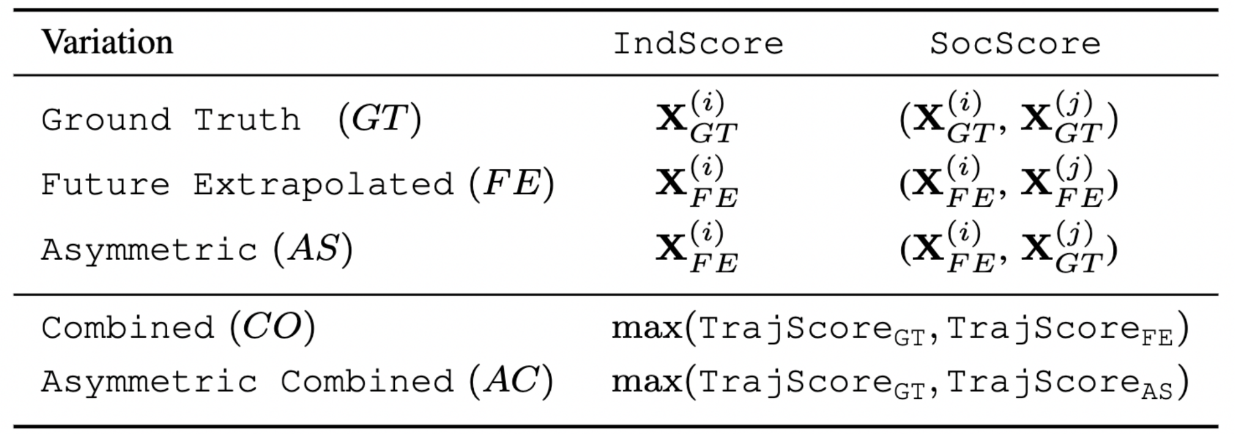
We linearly weigh the above features to compute individual and social scores for a given agent.

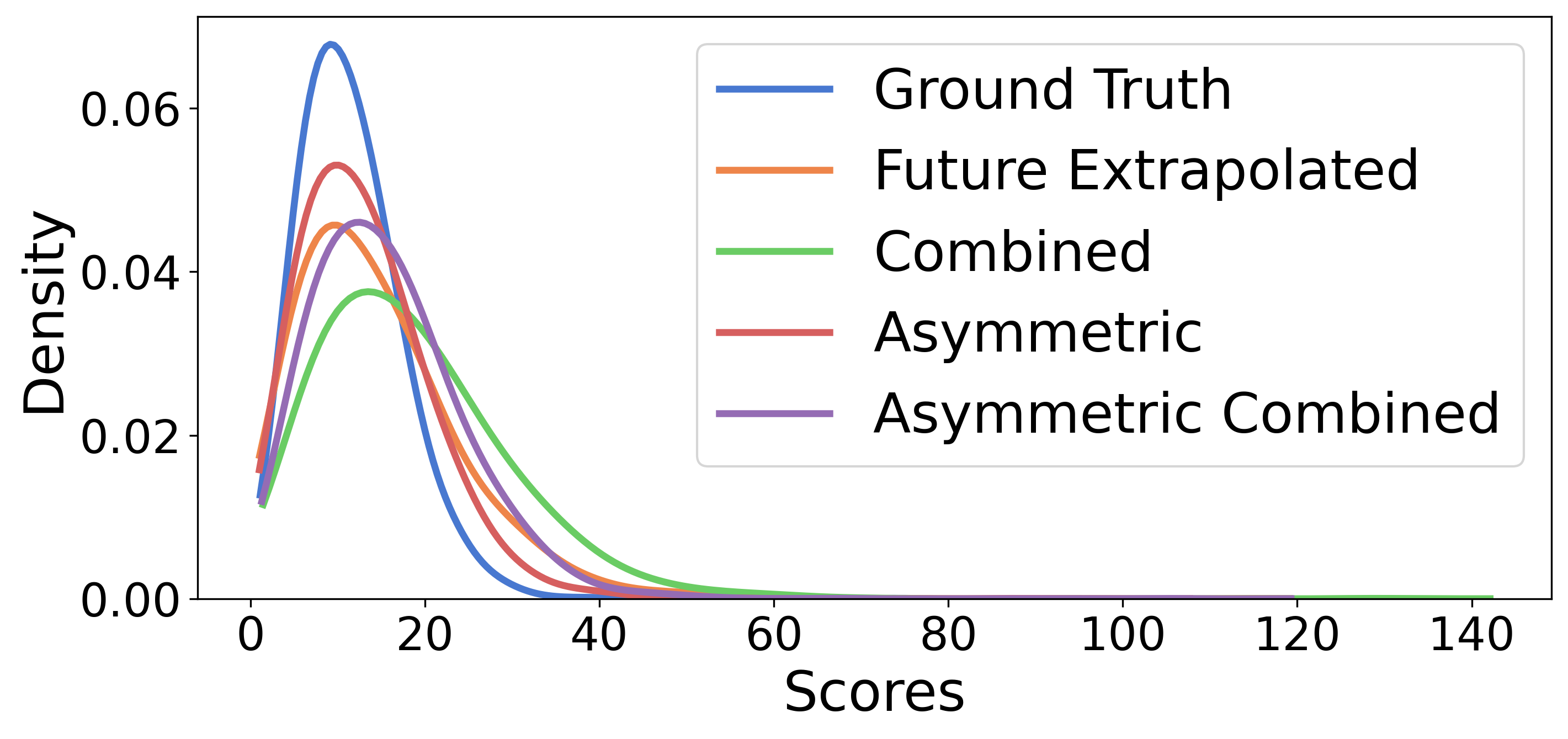
These scores are then combined to form an overall trajectory score, and finally a scene score representing the density-normalized sum of all trajectory scores.

We perform counterfactual extrapolation and re-scoring by emulating agents maintaining forward progress in their lanes, without reactivity (e.g., representing the behavior of a distracted driver). These future extrapolated trajectories are combined with ground truth trajectories as follows, resulting in the desired long tail distribution
Below, we show an animated example of a counterfactual future extrapolation. Here, the agent of interest is colored in black. On the left, we show the original scene where the agent anticipates the red traffic light ahead, and thus, reduces speed. On the right, we show the counterfactual extrapolation where the agent maintains speed, failing to anticipate the traffic light, and thus, collides with the agent ahead.
Downstream Tasks
We showcase our characterization and scoring methods on two downstream tasks, performed on the Waymo Open Motion Dataset (WOMD): distribution shift creation and robust trajectory prediction.
Distribution Shift Creation
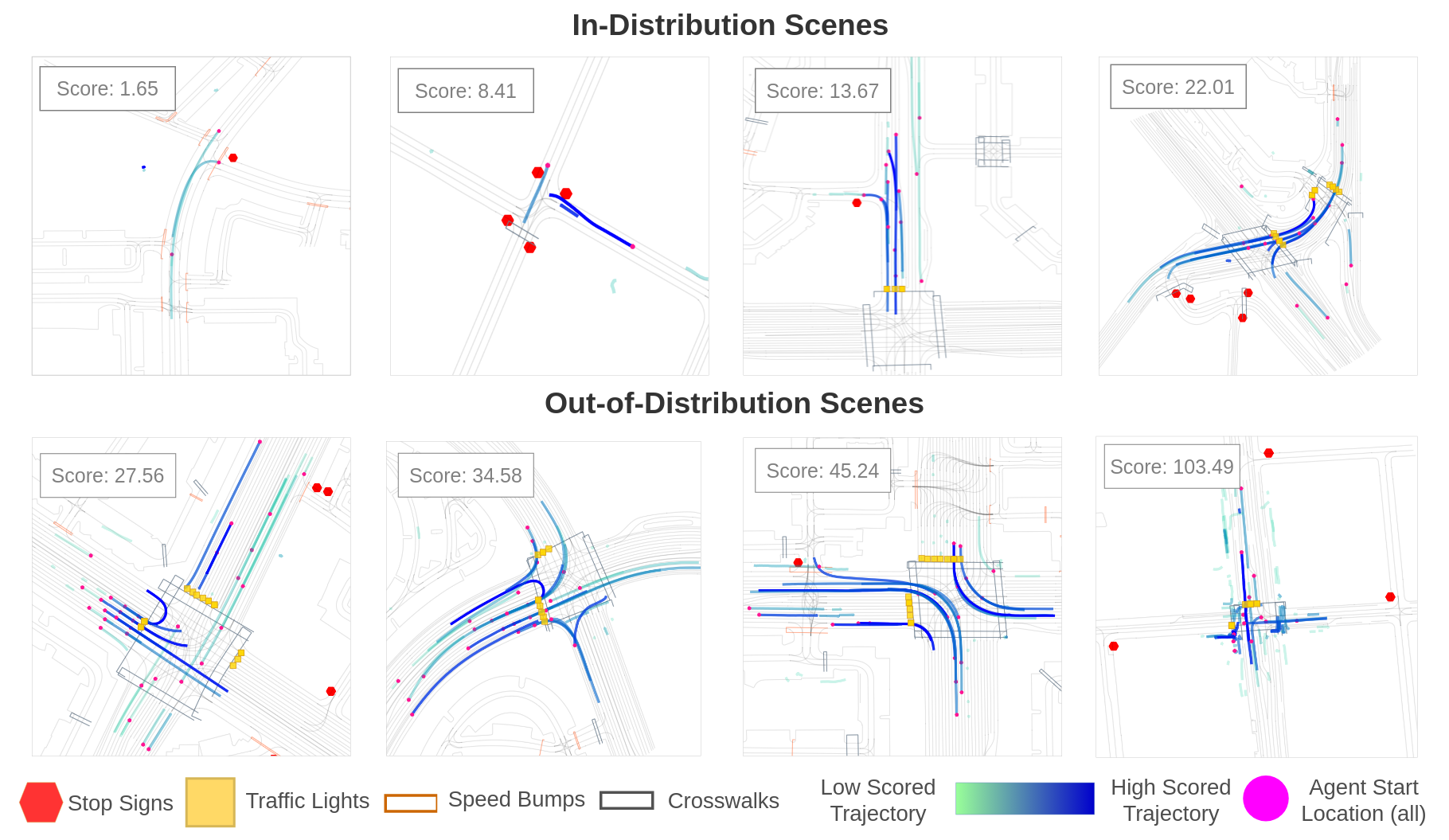
We split the dataset into an in-distribution (ID) set comprising scenarios with low scores, and an out-of-distribution (OOD) set comprising the 20% highest scored scenarios.
Robust Trajectory Prediction
We propose a remediation strategy to improve model performance in the OOD scenes. The strategy incorporates the scenario scores into the model’s loss function to increase the prediction model performance:

This loss encourages the model to not treat all scenarios and agents’ trajectories as equal and to care about safety-relevant situations.
Experiments and Results
Distribution Shift Creation
Animated examples of low-scored scenes, where lower interactivity and less conflict regions appear in the scene.
Animated examples of high-scored scenes, where more complex interactions and manuevers, higher agent density and diversity, and more conflict regions are observed.
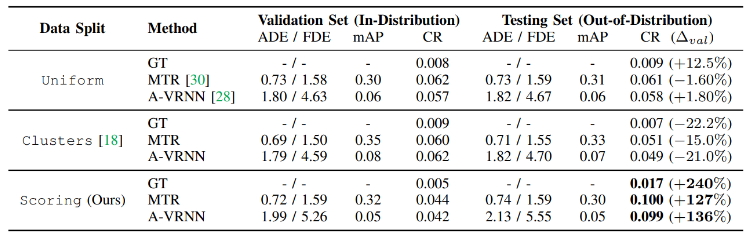
Distribution Shift Results
We compare our data splitting approach (Scoring) against a random splitting approach (Uniform) and a cluster-based domain normalization approach (Clusters).
Here, we show that our method incurs a higher collision rate compared to splitting methods that do not focus on safety.
Remediation Results
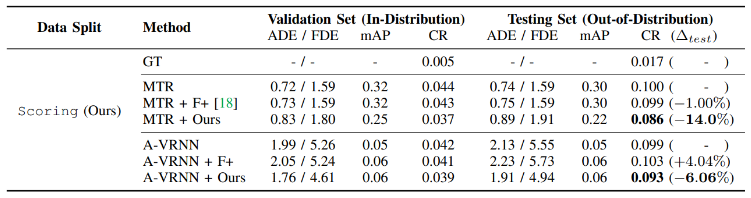
We compare our remediation approach against an unremediated baseline and Frenet+ (F+), a strategy that conditions prediction models on information projected to a Frenet frame. We show that our remediation strategy was the most effective in reducing collision rates on the tested models, achieving an average 10% reduction.
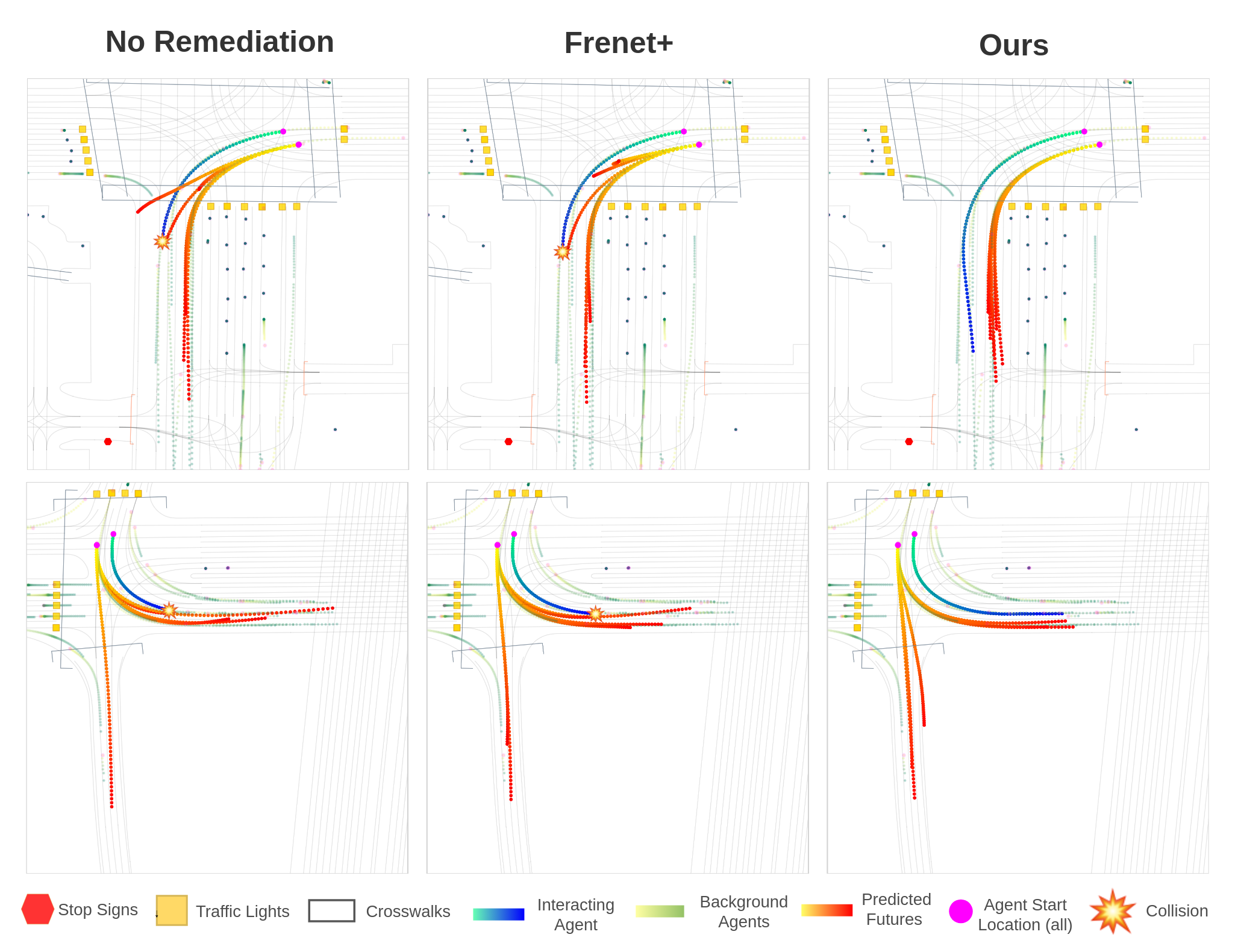
Qualitatively, we show that the unremediated model and the F+ strategy result in future modes that collide with an external agent. Meanwhile, our remediation approach avoids collisions, while still having reasonable mode diversity and lane conformance.
BibTeX
@INPROCEEDINGS{stoler2024safeshift,
author={Stoler, Benjamin and Navarro, Ingrid and Jana, Meghdeep and Hwang, Soonmin and Francis, Jonathan and Oh, Jean},
booktitle={2024 IEEE Intelligent Vehicles Symposium (IV)},
title={SafeShift: Safety-Informed Distribution Shifts for Robust Trajectory Prediction in Autonomous Driving},
year={2024},
volume={},
number={},
pages={1179-1186},
keywords={Meters;Collaboration;Predictive models;Robustness;Iron;Trajectory;Safety},
doi={10.1109/IV55156.2024.10588828}}